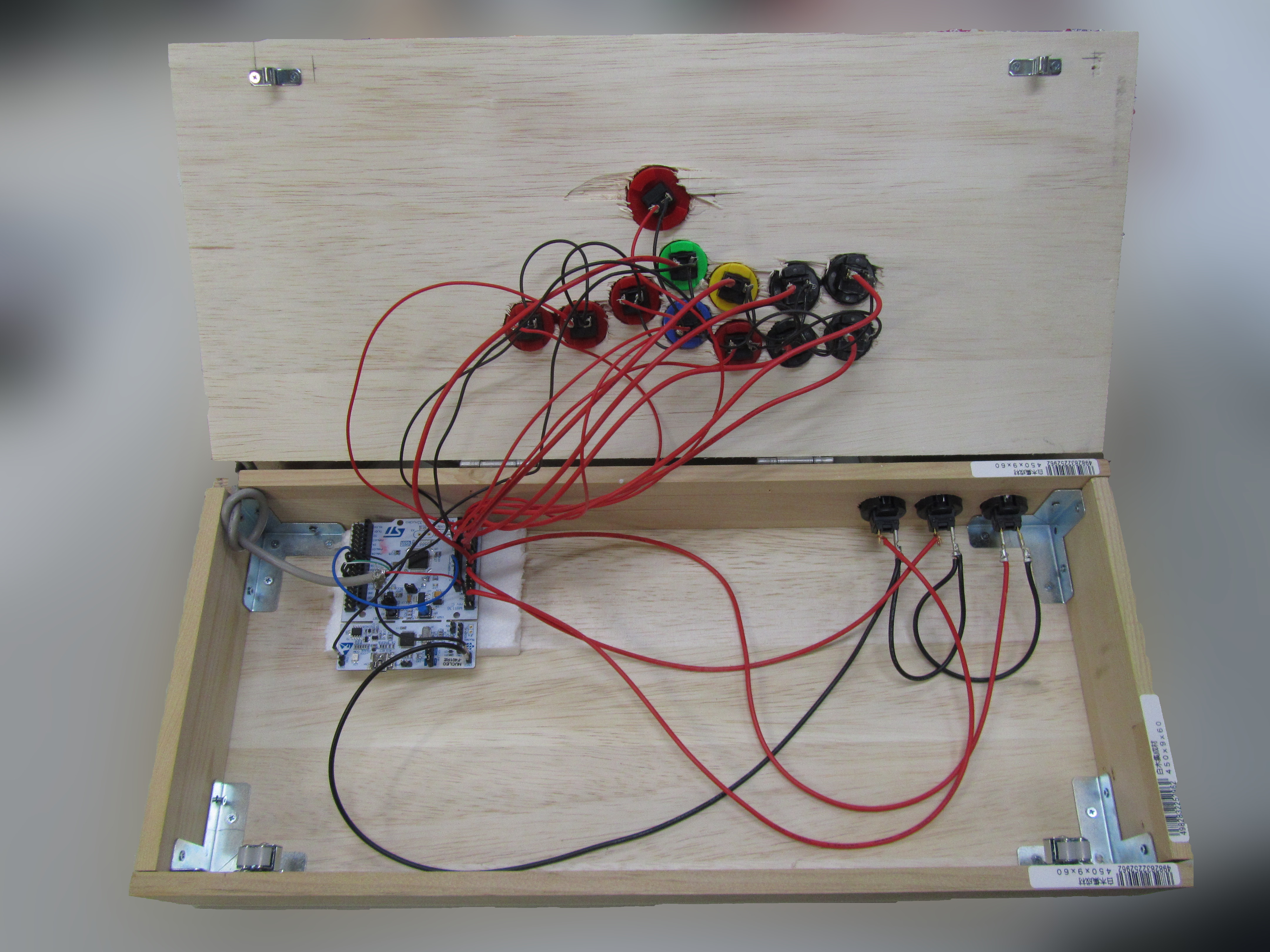
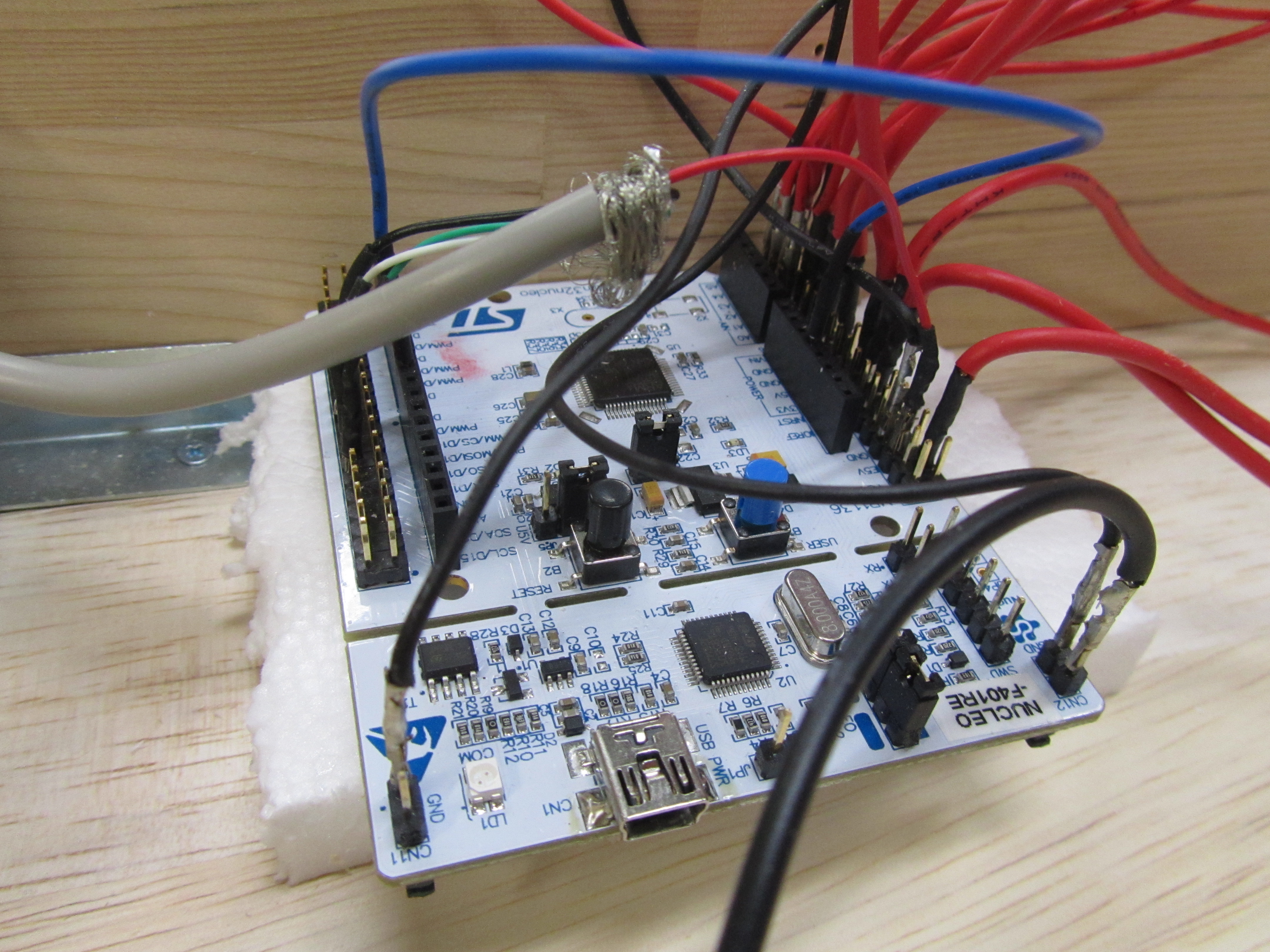
Modification of USB Joystick to work as a Hitbox-like game controller using the F401RE. Works reasonably well under Windows.
This is a hobby project trying to recreate a Hitbox Controller for fun .
The original code was based off of http://developer.mbed.org/users/wim/notebook/usb-joystick-device/ Slight modifications were made to the USB HID descriptor to up the number of buttons reported to 13.
Currently, this works well under Windows and Linux, but no luck getting it to work with Mac OS X or a PS3 so far.
If anybody has useful information, feel free to contribute. :)
p.s: My thread for hooking up an F401RE board as a USB device is here: http://developer.mbed.org/questions/5364/Cannot-get-the-Nucleo-F401RE-to-work-as-/
p.s.2: Cabling information and <del>pictures</del> will be uploaded in the near future.
p.s.3: 2015-04-20: added support for FRDM-KL25Z board. Due to the better usb functionality, this hitbox now works on Windows, Mac OS X, Linux and PS3 too! (minus the "PS" button...)


USBJoystick.h
- Committer:
- eimaiosatanas
- Date:
- 2015-04-20
- Revision:
- 2:278b7a590311
- Parent:
- 0:c8e9c90ca7f4
File content as of revision 2:278b7a590311:
/* USBJoystick.h */
/* USB device example: Joystick*/
/* Copyright (c) 2011 ARM Limited. All rights reserved. */
/* Modified Mouse code for Joystick - WH 2012 */
#ifndef USBJOYSTICK_H
#define USBJOYSTICK_H
#include "USBHID.h"
#define REPORT_ID_JOYSTICK 4
/* Common usage */
enum JOY_BUTTON {
JOY_B0 = 1,
JOY_B1 = 2,
JOY_B2 = 4,
JOY_B3 = 8,
};
#if(0)
enum JOY_HAT {
JOY_HAT_UP = 0,
JOY_HAT_RIGHT = 1,
JOY_HAT_DOWN = 2,
JOY_HAT_LEFT = 3,
JOY_HAT_NEUTRAL = 4,
};
#else
enum JOY_HAT {
JOY_HAT_UP = 0,
JOY_HAT_UP_RIGHT = 1,
JOY_HAT_RIGHT = 2,
JOY_HAT_RIGHT_DOWN = 3,
JOY_HAT_DOWN = 4,
JOY_HAT_DOWN_LEFT = 5,
JOY_HAT_LEFT = 6,
JOY_HAT_LEFT_UP = 7,
JOY_HAT_NEUTRAL = 8,
};
#endif
/* X, Y and T limits */
/* These values do not directly map to screen pixels */
/* Zero may be interpreted as meaning 'no movement' */
#define JX_MIN_ABS (-127) /*!< The maximum value that we can move to the left on the x-axis */
#define JY_MIN_ABS (-127) /*!< The maximum value that we can move up on the y-axis */
#define JT_MIN_ABS (-127) /*!< The minimum value for the throttle */
#define JX_MAX_ABS (127) /*!< The maximum value that we can move to the right on the x-axis */
#define JY_MAX_ABS (127) /*!< The maximum value that we can move down on the y-axis */
#define JT_MAX_ABS (127) /*!< The maximum value for the throttle */
/**
*
* USBJoystick example
* @code
* #include "mbed.h"
* #include "USBJoystick.h"
*
* USBJoystick joystick;
*
* int main(void)
* {
* while (1)
* {
* joystick.move(20, 0);
* wait(0.5);
* }
* }
*
* @endcode
*
*
* @code
* #include "mbed.h"
* #include "USBJoystick.h"
* #include <math.h>
*
* USBJoystick joystick;
*
* int main(void)
* {
* int16_t i = 0;
* int16_t throttle = 0;
* int16_t rudder = 0;
* int16_t x = 0;
* int16_t y = 0;
* int32_t radius = 120;
* int32_t angle = 0;
* int8_t button = 0;
* int8_t hat = 0;
*
* while (1) {
* // Basic Joystick
* throttle = (i >> 8) & 0xFF; // value -127 .. 128
* rudder = (i >> 8) & 0xFF; // value -127 .. 128
* button = (i >> 8) & 0x0F; // value 0 .. 15, one bit per button
* hat = (i >> 8) & 0x07; // value 0..7 or 8 for neutral
* i++;
*
* x = cos((double)angle*3.14/180.0)*radius; // value -127 .. 128
* y = sin((double)angle*3.14/180.0)*radius; // value -127 .. 128
* angle += 3;
*
* joystick.update(throttle, rudder, x, y, button, hat);
*
* wait(0.001);
* }
* }
* @endcode
*/
class USBJoystick: public USBHID {
public:
/**
* Constructor
*
* @param vendor_id Your vendor_id (default: 0x1234)
* @param product_id Your product_id (default: 0x0002)
* @param product_release Your product_release (default: 0x0001)
*/
USBJoystick(uint16_t vendor_id = 0x1234, uint16_t product_id = 0x0100, uint16_t product_release = 0x0001):
USBHID(0, 0, vendor_id, product_id, product_release, false)
{
_init();
connect();
};
/**
* Write a state of the mouse
*
* @param t throttle position
* @param r rudder position
* @param x x-axis position
* @param y y-axis position
* @param buttons buttons state
* @param hat hat state 0 (up), 1 (right, 2 (down), 3 (left) or 4 (neutral)
* @returns true if there is no error, false otherwise
*/
bool update(int16_t t, int16_t r, int16_t x, int16_t y, uint16_t buttons, uint8_t hat);
/**
* Write a state of the mouse
*
* @returns true if there is no error, false otherwise
*/
bool update();
/**
* Move the throttle position
*
* @param t throttle position
* @returns true if there is no error, false otherwise
*/
bool throttle(int16_t t);
/**
* Move the rudder position
*
* @param r rudder position
* @returns true if there is no error, false otherwise
*/
bool rudder(int16_t r);
/**
* Move the cursor to (x, y)
*
* @param x-axis position
* @param y-axis position
* @returns true if there is no error, false otherwise
*/
bool move(int16_t x, int16_t y);
/**
* Press one or several buttons
*
* @param button button state
* @returns true if there is no error, false otherwise
*/
bool button(uint16_t button);
/**
* Press hat
*
* @param hat hat state
* @returns true if there is no error, false otherwise
*/
bool hat(uint8_t hat);
/*
* To define the report descriptor. Warning: this method has to store the length of the report descriptor in reportLength.
*
* @returns pointer to the report descriptor
*/
virtual uint8_t * reportDesc();
private:
int8_t _t;
int8_t _r;
int8_t _x;
int8_t _y;
uint16_t _button;
uint8_t _hat;
void _init();
};
#endif